Projective Dynamics Presentation on Seminar
Projective Dynamics
State at
Implicit Euler Solver
step size:
plug (2) into (1)
It is equivalent to the minimization problem
Interpretation
: Inertia & external force term (momentum potential) : Internal energy term. (e.g. Simple FEM energy: )
So, the minimization is trying to find the balance between the inertia & external forces term and the internal energy term.
Imagining a moving jellow, for every particle on it, it has to find a compromise between the momentum and self deformation. (deforming and moving at same time)
Elastic Potentials
defines a constraint manifold of all possible undeformed configurations, while measures how far the deformed configuration is from this manifold.
Author decoupled these 2 concepts through a projection auxiliary variable
potential functions
So minimizing
More generally,
Projective Implicit Euler Solver
Eq.(4) became the minimization of
Local Solve
fix
and
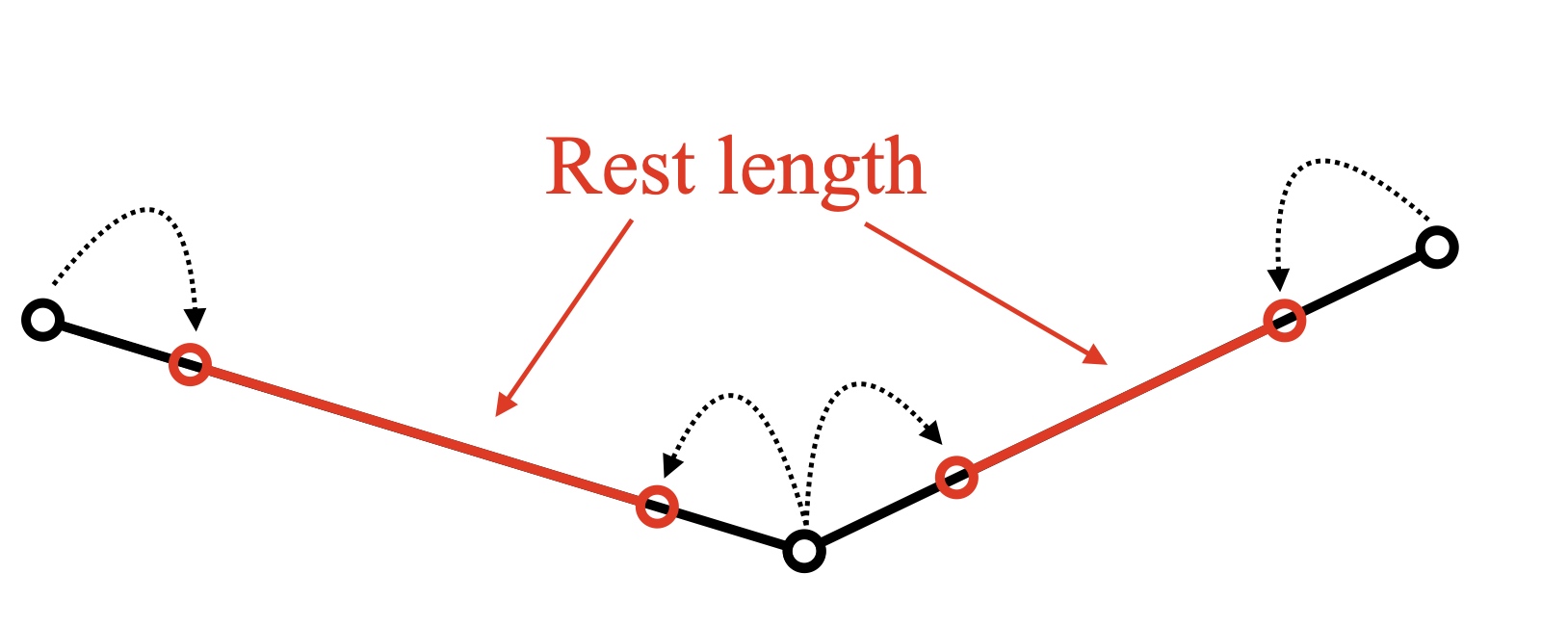
Intuitively, the local step means projecting each constraint to its rest state.
Global Solve
fix
when fixing
Expand the second term, we get
taking the derivative of Eq.(6) over
with simple transformation
Let
through sparse Cholesky decomposition,
and the right hand side will keep changing due to
Intuitive explanation
Local Step
taking mass-spring system as example. Imagining 2 extended springs connected together. what local solve does is project each spring into their rest length. After that, two springs will be detached and connected point(particle) will be duplicated.
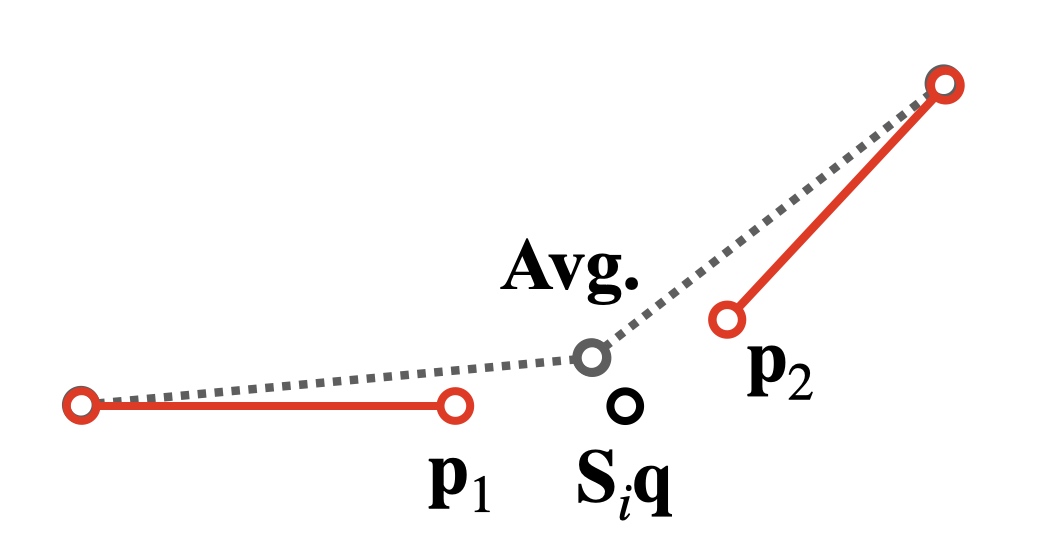
Global Step & Choice of A and B
The global solve will bring these two springs connected again. Recall that there are two constant metrics
For simplest case:
the result is
This leads to poor convergence rate. As shown below, if i pull the corner of this mass-spring cloth, the change propagates to the end will be very slow if
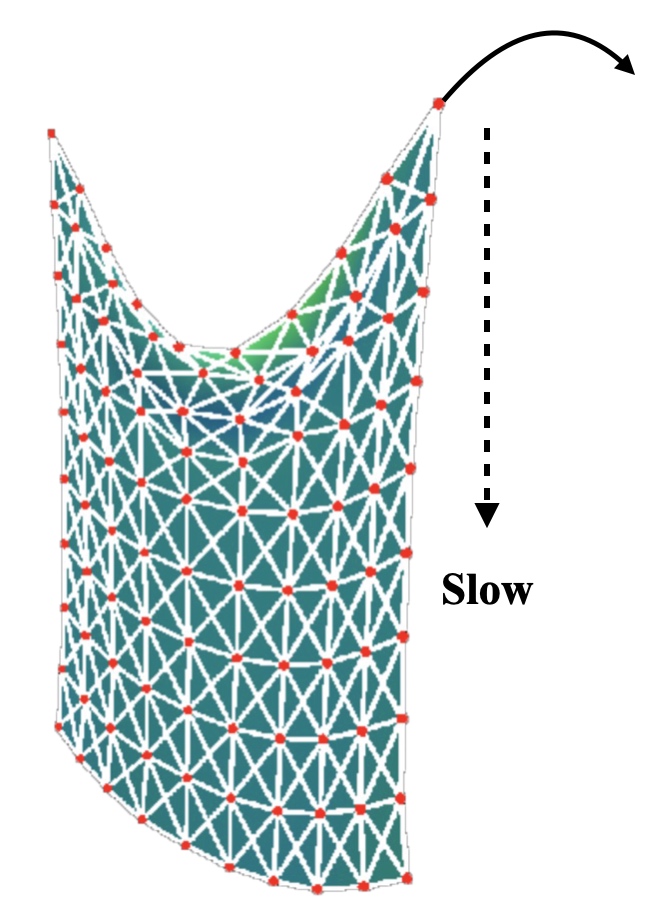
better choice
For the connected two springs system, it will became